
Longread
Robotics for quality-driven post-harvest supply chains
Monitoring quality and safety, making decisions, and taking actions along the different parts of the post-harvest chain require different approaches, dependent on the individual chain elements. Robotics can play a vital role in addressing such challenges in the post-harvest chain. Smart Technology, the technology that connects the real world with the digital world, has not stopped developing, and the advances in materials science, artificial intelligence and sensor technology have fueled the developments in Robotics. We describe in this longread about current developments in using robotic technologies suitable for grasping, manipulation, and movement of fresh products across the post-harvest supply chain.
Demands on the food system present challenges and opportunities to the supply chain actors, including the efficient use and smart optimisation of current processes (e.g., to reduce food and ingredient waste, to use energy efficiently, to minimise production costs), offset labor shortages (e.g., Brexit-related shortages of international workers in the EU), provide human-contact-free food handling (e.g., to reduce the risk of pathogen transmission), and to provide personalised food (i.e., customized for target groups and individuals). Automation and robotic technologies are expected to play a major role in addressing these issues, which is evident in the growing number of robotic installations across the food industry.

But what role are the robots playing in the fresh-food sector? Fresh produce, by its nature, is perishable. The primary role of the postharvest sector is to ensure fresh product quality from farm to fork. Still, a significant portion of the food is lost or wasted in all steps of the chain, reaching over 30% in high, middle, and lower income countries, almost half of which is lost prior to retail. To minimize these losses, it is paramount to have suitable harvesting protocols (so-called Standard Operating Procedures or SOPs), grading-sorting processes, and organization of the transport chain and storage conditions. In this longread, we do not focus on the multitude of robots that exist in the primary process: harvesting robots for the open field and indoor farming, weed detection and removal robots, scouting robots for yield estimation or early pest detection, and robots on animal farms like the milking robots or egg collection robots. Here, we are instead interested in highlighting the use of robots in the postharvest domain.
In the postharvest supply chain, quality management of the fresh produce plays a prominent role. From the supply chain performance perspective, an integrated view of logistics and product quality has been considered essential by several researchers. Robotics and automation are expected to offer a multitude of opportunities in food supply chain logistics, such as increased productivity, higher efficiency, resource optimization, end-to-end tracking and tracing, improved warehouse logistics, and reduced health and safety hazards. Monitoring quality and safety, making decisions, and taking actions along the different parts of the post-harvest chain require different approaches, dependent on the individual chain elements. Robotics can play a vital role in addressing such challenges in the post-harvest chain. We will explore the developments in two key areas of robotics: robotic grasping and manipulation, robotic navigation.
Robotic grasping and manipulation
Factories for fresh food handling and processing are changing, and the lack of labor is an important driver for robotic developments, especially in high-income countries like the Netherlands. Labor shortages create a capacity vacuum, and robotics is seen as one of the key solutions. Robots typically perform repetitive tasks like picking up and moving fruits and vegetables. Tasks like stacking and palletizing, don't require direct contact with the products. In these applications industrial robots are commonly used. These types of robots can be used in various industries, not just the food industry. Besides these, robots, famous for precision and efficiency, a new generation of collaborative robots, also known as cobots, are being developed which can work alongside humans in a shared workspace. These robots are generally light-weight, equipped with sensors and safety features allowing them operate in near (and in collaboration) with humans, and are highly programmable in order to perform different tasks. The safety and flexibility are the primary features of the cobots.

Besides safety of human co-workers, robotic handling of food, including fresh products, brings additional challenges. These robots need to interact with the live products. In the post-harvest supply chain, direct contact between the robot and the products occurs primarily during quality control (e.g., grading and sorting) and pick-place operations (e.g., primary packaging). The main point of contact is between the produce and the robotic end-effector (the end-of-arm tooling), which can grab, hold, and release objects, as well as move the objects to a desired location. Carrying out these tasks pose two main challenges:
- Manipulating fresh products is challenging due to their complex and varied characteristics, such as irregular shapes and sizes (e.g., from cabbage to berries) and high deformability (e.g., grapes or red-current trusses).
- Improper handling of fresh produce during grasping and manipulation can result in damage as well as potential spread of pathogens.
Developments in grasping solutions
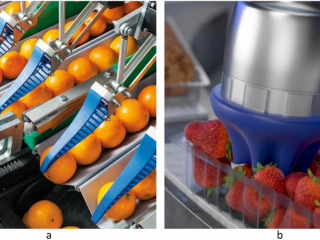
The industry primarily uses two approaches for robotic handling of fresh products: contact-based and air-based mechanisms. Contact-based mechanisms include grippers like electric, pneumatic, hydraulic, inflating rubber, and multi-body mechanisms. Air-based mechanisms involve suction cups combined with contact-based grippers or levitation grippers based on the Bernoulli principle. However, pinching and freeze gripping, commonly used for food manipulation, are unsuitable for fruits and vegetables as they can damage the produce.

Advancements in materials science are leading to lighter and simpler grasping solutions. Universal grippers made with advanced soft and compliant materials can change shape in response to actuators and object interactions, enabling them to handle objects of different shapes, sizes, and rigidity. Additionally, increased mechanical compliance also means that the control complexity for these grippers is highly reduced. In the last decade, several such solutions, primarily silicone elastomer-based grippers, have transitioned from research labs to commercial products. Due to strict hygiene requirements, not all of these end-effectors are suitable for fresh products (or foodstuff, in general). Cobots with soft food-grade robotic end-effectors are paving the way towards generalized handling solutions, which are highly relevant for fragile fresh products. For post-harvest problems, the key utility of these grasping and manipulation systems lie in their ability to not deteriorate the fresh product quality, neither at individual level (e.g., due to bruising, dropping, leaving residues), nor at the batch level (carrying over contaminants from one product to another). As the number and variety of robotic end-effectors continues to increase, benchmarking procedures are essential to determine the suitability of grasping and manipulation materials and techniques according to post-harvest quality criteria.
Robotic navigation
For navigation of products, another type of robotic solution provides new possibilities in the post-harvest chain: the autonomous mobile robot (AMR). These robots can navigate on their own and offer opportunities to optimize transportation and material flows. Specifically, AMRs can be valuable in enhancing autonomous quality monitoring and decision-making processes focused on maintaining high product quality.
Quality sensitive warehouse automation
When it comes to perishable products, managing inventory and warehouses becomes more complex. It's important to consider factors like product perishability, quality-driven demand forecasting, pricing and stock management, preventing food loss, and meeting sustainability requirements. These considerations lead to a lot of movement and material flow in fresh produce warehouses, especially when it comes to tasks like monitoring, checking storage shelves, picking goods, and restocking shelves. In traditional warehouses, the inefficiency of these tasks can be a problem, especially in time-sensitive operations. That's why there has been a focus on developing warehouse automation methods, including the use of AMRs, for tasks like storage and retrieval, as well as organizing storage spaces, particularly in e-retail and manufacturing.
Different types of Autonomous Mobile Robots
AMRs are capable of reacting to their surroundings, follow designated trajectory based on facility maps, dynamically respond to and navigate around obstacles, move at desired speeds, and haul varying payloads.

A common use of autonomous mobile robots (AMRs) is in assisted picking. In this scenario, the robot either follows the picker to the picking location or goes to the location and waits for the picker to arrive. The picker then loads the desired goods onto the robot. The AMRs then navigate back to a central depot where the goods are unloaded. These picking robots can be added to existing warehouses without major modifications.
There are also warehouse systems being developed with a focus on robotic automation. For example, the "Robotic Mobile Fulfillment System" uses a swarm of robots to lift movable racks in warehouses and deliver them to workers. This system can automatically sort inventory and easily adapt its warehouse layout. Another automated storage system is the "Robot-based Compact Storage and Retrieval system." It stores goods-holding bins in a highly dense manner with a grid on top. Mobile robots can move on top of the grid, lift and extract bins, and transport them to workstations.
Opportunities for mobile robots for post-harvest quality management
AMRs in industrial settings offer a wide range of standard applications that support warehouse automation, resulting in benefits such as efficient storage and retrieval, streamlined material flows, automated inventory management, improved safety conditions, and addressing labor shortages.
From the perspective of produce quality, AMRs present exciting new possibilities for monitoring the quality of fresh produce and making decisions based on quality. With their high payload capacity, ability to autonomously traverse warehouses and transport goods (typically packaged products, bins, or racks), provide new opportunities for monitoring fresh produce quality and making quality-driven decisions. AMRs can be equipped with new sensing equipment. They can autonomously navigate the warehouse while actively measuring the environment using climate sensors. By coming close to or into contact with the products, these sensors can provide real-time measurements of quality traits and climate conditions.
The transportation capability of AMRs enables them to autonomously move products based on their quality, environmental conditions, and necessary adjustments due to fluctuations in warehouse stock. This combination of quality considerations with robotic system concerns opens up a new realm of research and operational opportunities.